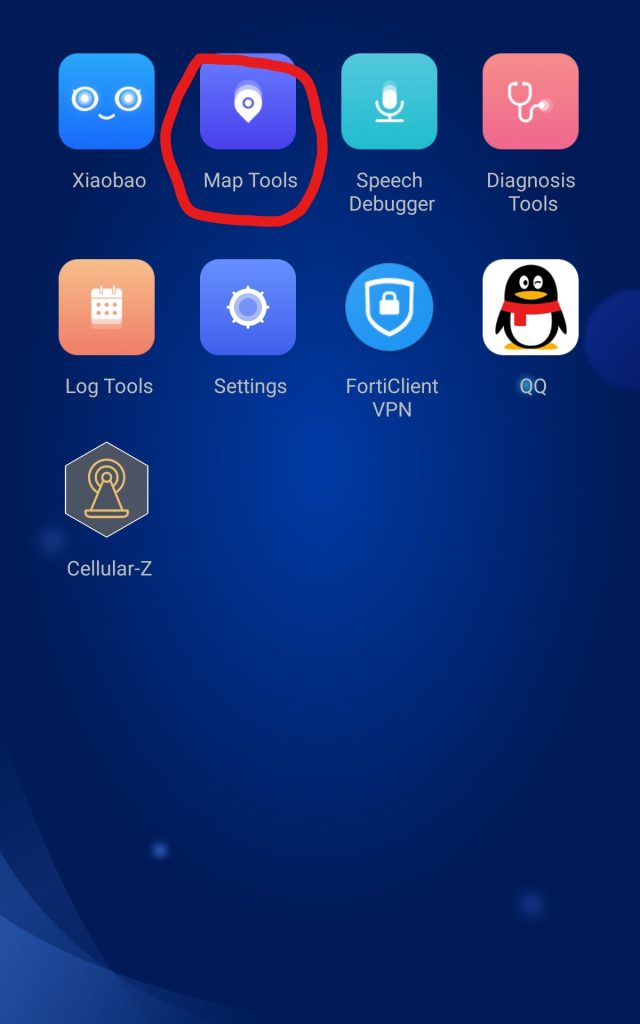
1.Swipe down from top of the screen with 3 fingers then choose Map tools
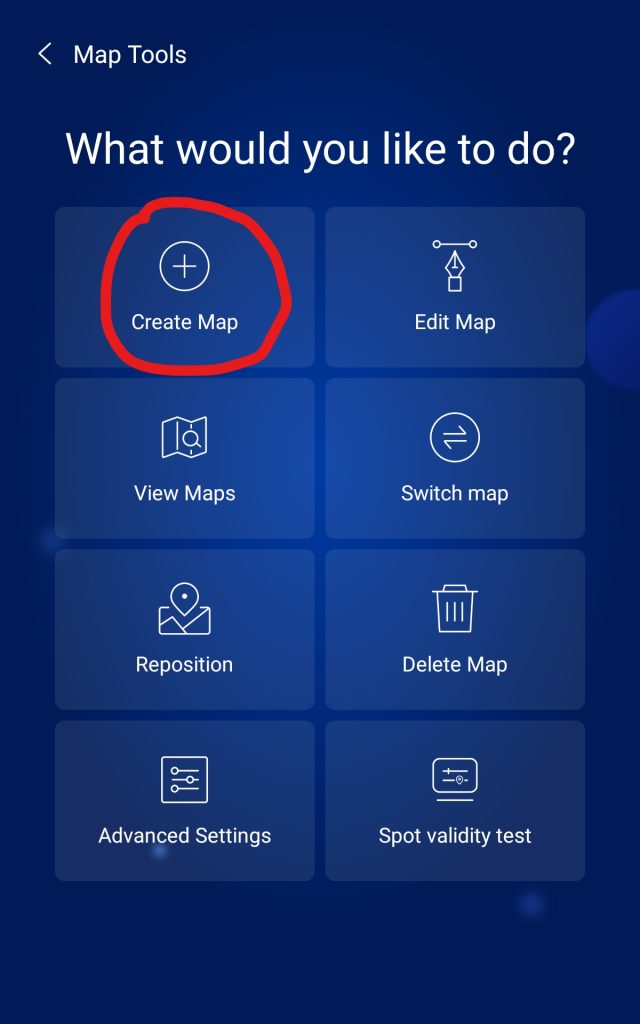
2. Choose create map
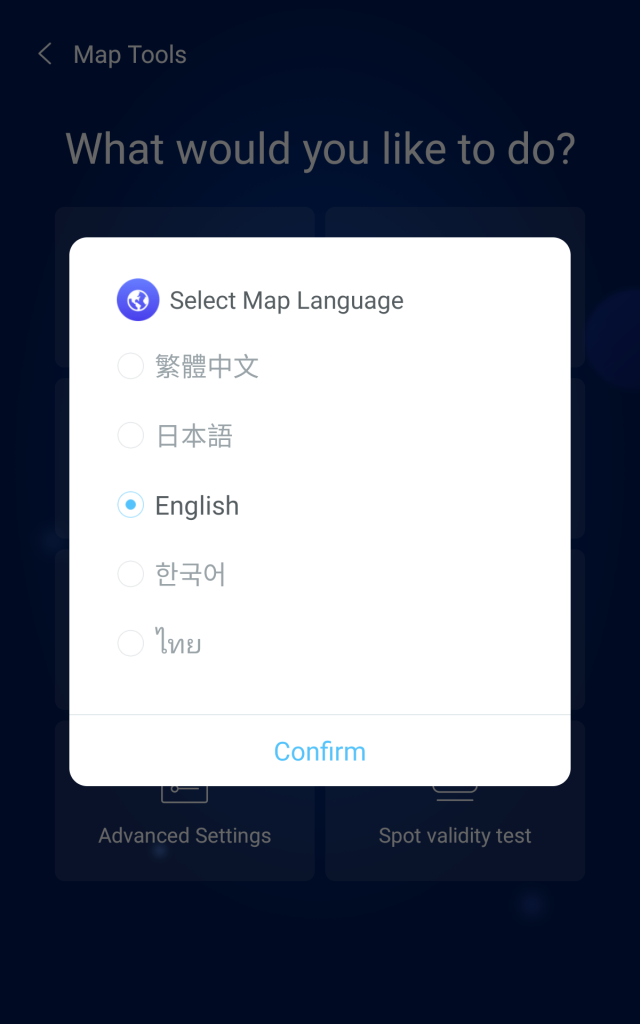
3.Select Map Language
4.Add a title for the map

5.Click confirm to start scanning map.
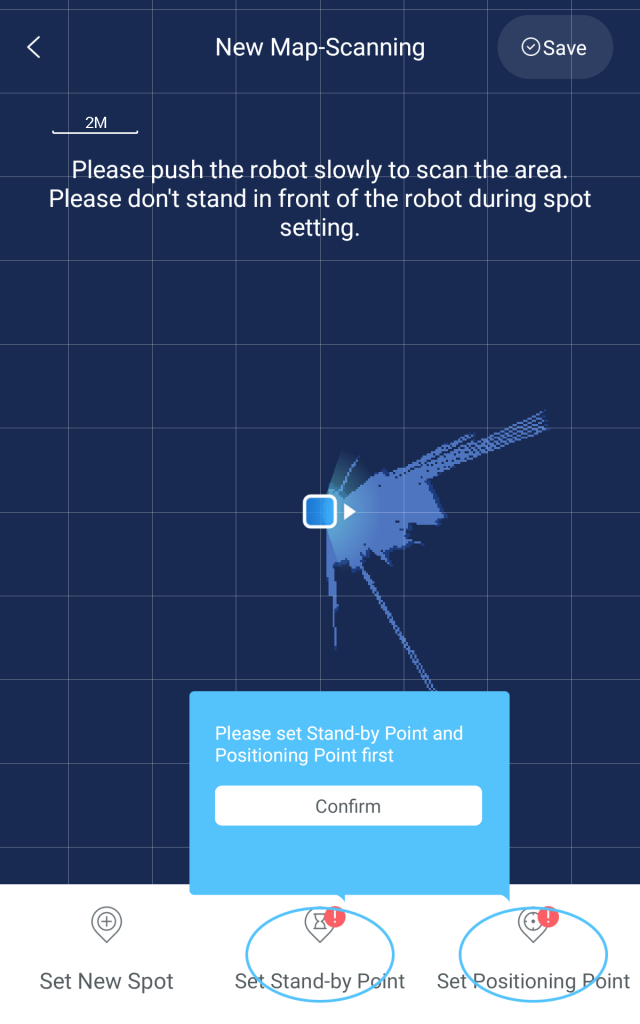
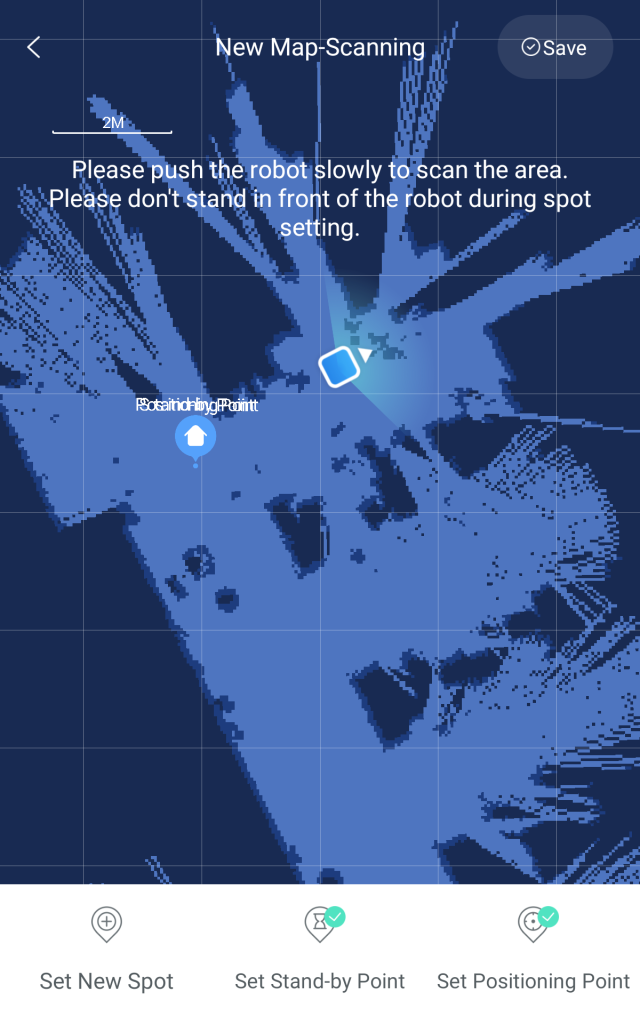
6.Stand behind the robot and push the robot to move all round your place as walking speed. Do not cover the IR camera on top of the robot during scanning.

7.Once finishing new map scanning. set positioning point which help robot find its location when it lost position.As the same time, setting stand-by point which is the robot pick up food.
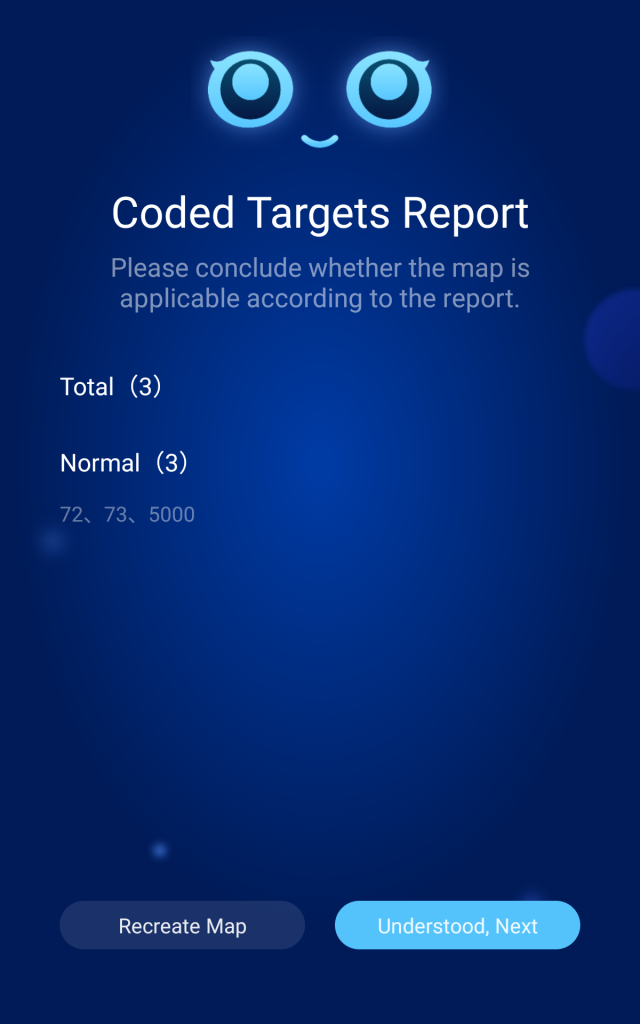
8.Click save on upper right corner. Confirm the sticker number you canned and click next
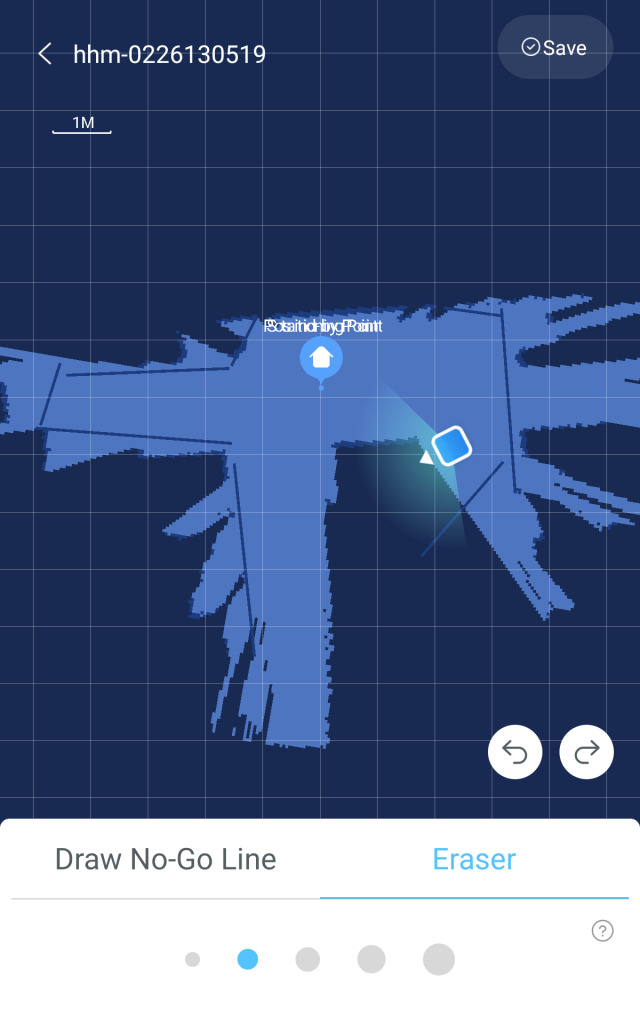
9.Draw no-go line to limit the cope where robot can go and avoid the obstacles in case the robot bump against obstacles. Straight line was priority to sue. You can use eraser to modify the wrong line.
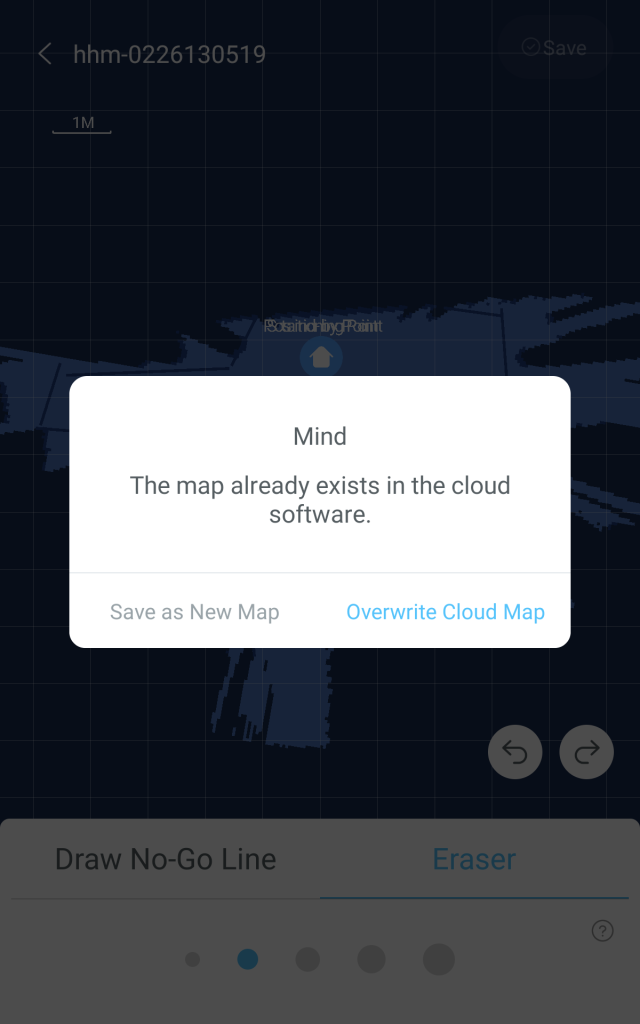
10. Click save on upper right corner then click overwrite cloud map
11. Congratulations ! You have created a new map.